diff options
Diffstat (limited to 'docs')
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/introduction.md | 6 |
1 files changed, 3 insertions, 3 deletions
diff --git a/docs/user_guide/aruco_markers_pipeline/introduction.md b/docs/user_guide/aruco_markers_pipeline/introduction.md index f781fe8..dd82900 100644 --- a/docs/user_guide/aruco_markers_pipeline/introduction.md +++ b/docs/user_guide/aruco_markers_pipeline/introduction.md @@ -7,7 +7,7 @@ The OpenCV library provides a module to detect fiducial markers into a picture a 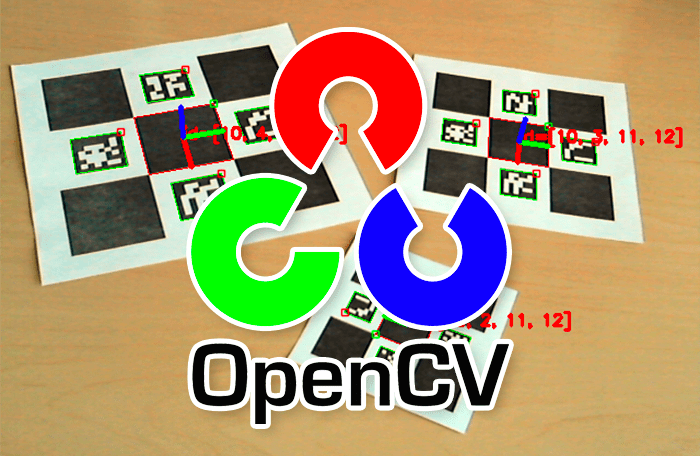 -The ArGaze [ArUcoMarkers submodule](../../argaze.md/#argaze.ArUcoMarkers) eases markers creation, optic calibration, markers detection and 3D scene pose estimation through a set of high level classes. +The ArGaze [ArUcoMarkers submodule](../../argaze.md/#argaze.ArUcoMarkers) eases markers creation, markers detection and 3D scene pose estimation through a set of high level classes. First, let's look at the schema below: it gives an overview of the main notions involved in the following chapters. @@ -19,8 +19,8 @@ To build your own ArUco markers pipeline, you need to know: * [How to describe scene's AOI](aoi_description.md), * [How to load and execute ArUco markers pipeline](configuration_and_execution.md), * [How to estimate scene pose](pose_estimation.md), -* [How to project AOI into camera frame](aoi_projection.md) -<!-- * [How to visualize ArUcoCamera and ArUcoScenes](visualisation.md) --> +* [How to project AOI into camera frame](aoi_projection.md), +* [How to define an AOI as a frame](aoi_frame.md) More advanced features are also explained like: |