diff options
Diffstat (limited to 'docs')
| -rw-r--r-- | docs/img/aruco_scene.png | bin | 11903 -> 13704 bytes | |||
| -rw-r--r-- | docs/user_guide/augmented_reality_pipeline/aruco_scene_creation.md | 131 | ||||
| -rw-r--r-- | docs/user_guide/augmented_reality_pipeline/introduction.md | 19 |
{kind=link}
3 files changed, 150 insertions, 0 deletions
diff --git a/docs/img/aruco_scene.png b/docs/img/aruco_scene.png Binary files differindex 611676e..eee548d 100644 --- a/docs/img/aruco_scene.png +++ b/docs/img/aruco_scene.png diff --git a/docs/user_guide/augmented_reality_pipeline/aruco_scene_creation.md b/docs/user_guide/augmented_reality_pipeline/aruco_scene_creation.md new file mode 100644 index 0000000..ce080ca --- /dev/null +++ b/docs/user_guide/augmented_reality_pipeline/aruco_scene_creation.md @@ -0,0 +1,131 @@ +Setup ArUco markers scene +========================= + +The OpenCV library provides a module to detect fiducial markers into a picture and estimate its pose (cf [OpenCV ArUco tutorial page](https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html)). + +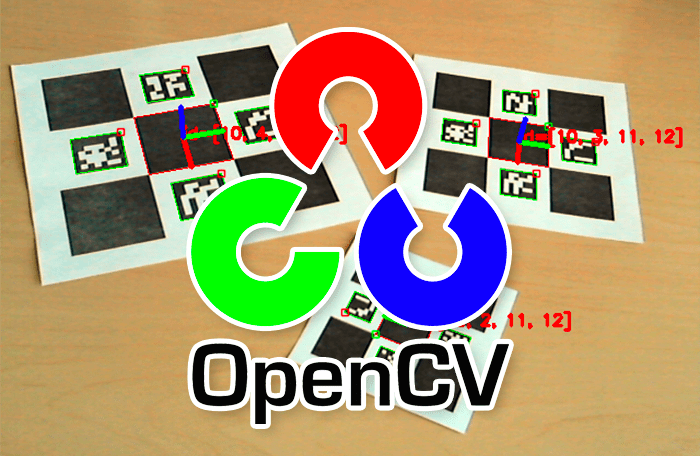 + +The ArGaze [ArUcoMarkers submodule](../../argaze.md/#argaze.ArUcoMarkers) eases markers creation and description of their expected place for further camera pose estimation. + +## Print ArUco markers from a ArUco dictionary + +ArUco markers always belongs to a set of markers called ArUco markers dictionary. + + + +Many ArUco dictionaries exist with properties concerning the format, the number of markers or the difference between each markers to avoid error in tracking. + +Here is the documention [about ArUco markers dictionaries](https://docs.opencv.org/3.4/d9/d6a/group__aruco.html#gac84398a9ed9dd01306592dd616c2c975). + +The creation of [ArUcoMarkers](../../argaze.md/#argaze.ArUcoMarkers.ArUcoMarker) pictures from a dictionary is illustrated in the code below: + +``` python +from argaze.ArUcoMarkers import ArUcoMarkersDictionary + +# Create a dictionary of specific April tags +aruco_dictionary = ArUcoMarkersDictionary.ArUcoMarkersDictionary('DICT_APRILTAG_16h5') + +# Export marker n°5 as 3.5 cm picture with 300 dpi resolution +aruco_dictionary.create_marker(5, 3.5).save('./markers/', 300) + +# Export all dictionary markers as 3.5 cm pictures with 300 dpi resolution +aruco_dictionary.save('./markers/', 3.5, 300) +``` + +Let's print some of them before to go further. + +!!! warning + Print markers with a blank zone around them to help in their detection. + +## Describe expected ArUco markers place + +Once [ArUcoMarkers](../../argaze.md/#argaze.ArUcoMarkers.ArUcoMarker) pictures are placed into a scene it is possible to describe their expected 3D place into a file. + + + +What ever the origin is, all expected markers places need to be described in an [right-handed 3D axis](https://robotacademy.net.au/lesson/right-handed-3d-coordinate-frame/) where, from a camera point of view: + +* +X is pointing to the right, +* +Y is pointing to the top, +* +Z is pointing to camera side. + +!!! warning + All ArUco markers spatial values must be given in **centimeters**. + +### Edit OBJ file description + +OBJ file format could be exported from most 3D editors. + +``` obj +o DICT_APRILTAG_16h5#0_Marker +v -5.000000 14.960000 0.000000 +v 0.000000 14.960000 0.000000 +v -5.000000 19.959999 0.000000 +v 0.000000 19.959999 0.000000 +vn 0.0000 0.0000 1.0000 +s off +f 1//1 2//1 4//1 3//1 +o DICT_APRILTAG_16h5#1_Marker +v 25.000000 14.960000 0.000000 +v 30.000000 14.960000 0.000000 +v 25.000000 19.959999 0.000000 +v 30.000000 19.959999 0.000000 +vn 0.0000 0.0000 1.0000 +s off +f 5//2 6//2 8//2 7//2 +o DICT_APRILTAG_16h5#2_Marker +v -5.000000 -5.000000 0.000000 +v 0.000000 -5.000000 0.000000 +v -5.000000 0.000000 0.000000 +v 0.000000 0.000000 0.000000 +vn 0.0000 0.0000 1.0000 +s off +f 9//3 10//3 12//3 11//3 +o DICT_APRILTAG_16h5#3_Marker +v 25.000000 -5.000000 0.000000 +v 30.000000 -5.000000 0.000000 +v 25.000000 0.000000 0.000000 +v 30.000000 0.000000 0.000000 +vn 0.0000 0.0000 1.0000 +s off +f 13//4 14//4 16//4 15//4 +``` + +Here are common OBJ file features needed to describe ArUco markers place: + +* Object lines (line starting with *o* key) indicate markers dictionary and id by following a format: **DICTIONARY**#**ID**\_Marker. +* Vertice lines (lines starting with *v* key) indicate markers corners. The marker size will be automatically deducted from the geometry. +* Plane normals (lines starting with *vn* key) need to be exported for further pose estimation. +* Face (lines starting with *f* key) link vertices and normals indexes together. + +!!! warning + All markers must have the same size and belong to the same dictionary. + +### Edit JSON file description + +JSON file format allows to describe markers places using translation and euler angle rotation vectors. + +``` json +{ + "dictionary": "DICT_APRILTAG_16h5", + "marker_size": 5, + "places": { + "0": { + "translation": [-2.5, 17.5, 0], + "rotation": [0.0, 0.0, 0.0] + }, + "1": { + "translation": [27.5, 17.5, 0], + "rotation": [0.0, 0.0, 0.0] + }, + "2": { + "translation": [-2.5, -2.5, 0], + "rotation": [0.0, 0.0, 0.0] + }, + "3": { + "translation": [27.5, -2.5, 0], + "rotation": [0.0, 0.0, 0.0] + } + } +} +``` diff --git a/docs/user_guide/augmented_reality_pipeline/introduction.md b/docs/user_guide/augmented_reality_pipeline/introduction.md new file mode 100644 index 0000000..a06b1e2 --- /dev/null +++ b/docs/user_guide/augmented_reality_pipeline/introduction.md @@ -0,0 +1,19 @@ +Overview +======== + +This section explains how to build augmented reality pipelines based on ArUco Markers technology for various use cases. + +First, let's look at the schema below: it gives an overview of the main notions involved in the following chapters. + + + +To build your own augmented reality pipeline, you need to know: + +* [How to setup an ArUco markers scene](aruco_scene_creation.md), +* [How to deal with an ArCamera instance](ar_camera_configuration_and_execution.md), +* [How to add ArScene instance](ar_scene.md), +* [How to visualize ArCamera and ArScenes](visualisation.md) + +More advanced features are also explained like: + +* [How to script augmented reality pipeline](advanced_topics/scripting.md) |
{kind=link}
{kind=link}