diff options
Diffstat (limited to 'docs/user_guide/aruco_markers_pipeline')
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/advanced_topics/aruco_detector_configuration.md | 40 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/advanced_topics/optic_parameters_calibration.md | 66 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/advanced_topics/scripting.md | 136 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/aoi_3d_description.md | 53 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/aoi_3d_frame.md | 128 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/aoi_3d_projection.md (renamed from docs/user_guide/aruco_markers_pipeline/aoi_projection.md) | 51 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/aoi_description.md | 62 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/aruco_markers_description.md | 35 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/configuration_and_execution.md | 41 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/introduction.md | 24 | ||||
| -rw-r--r-- | docs/user_guide/aruco_markers_pipeline/pose_estimation.md | 30 |
11 files changed, 508 insertions, 158 deletions
diff --git a/docs/user_guide/aruco_markers_pipeline/advanced_topics/aruco_detector_configuration.md b/docs/user_guide/aruco_markers_pipeline/advanced_topics/aruco_detector_configuration.md new file mode 100644 index 0000000..f5b66c6 --- /dev/null +++ b/docs/user_guide/aruco_markers_pipeline/advanced_topics/aruco_detector_configuration.md @@ -0,0 +1,40 @@ +Improve ArUco markers detection +=============================== + +As explain in [OpenCV ArUco documentation](https://docs.opencv.org/4.x/d1/dcd/structcv_1_1aruco_1_1DetectorParameters.html), ArUco markers detection is highly configurable. + +## Load ArUcoDetector parameters + +[ArUcoCamera.detector.parameters](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoDetector.Parameters) can be loaded thanks to a dedicated JSON entry. + +Here is an extract from the JSON [ArUcoCamera](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) configuration file with ArUco detector parameters: + +```json +{ + "name": "My FullHD camera", + "size": [1920, 1080], + "aruco_detector": { + "dictionary": "DICT_APRILTAG_16h5", + "marker_size": 5, + "parameters": { + "cornerRefinementMethod": 3, + "aprilTagQuadSigma": 2, + "aprilTagDeglitch": 1, + "useAruco3Detection": 1 + } + }, + ... +``` + +## Print ArUcoDetector parameters + +```python +# Assuming ArUcoCamera is loaded +... + +# Print all ArUcoDetector parameters +print(aruco_camera.aruco_detector.parameters) + +# Print only modified ArUcoDetector parameters +print(f'{aruco_camera.aruco_detector.parameters:modified}') +``` diff --git a/docs/user_guide/aruco_markers_pipeline/advanced_topics/optic_parameters_calibration.md b/docs/user_guide/aruco_markers_pipeline/advanced_topics/optic_parameters_calibration.md index 455d95a..3277216 100644 --- a/docs/user_guide/aruco_markers_pipeline/advanced_topics/optic_parameters_calibration.md +++ b/docs/user_guide/aruco_markers_pipeline/advanced_topics/optic_parameters_calibration.md @@ -3,11 +3,11 @@ Calibrate optic parameters A camera device have to be calibrated to compensate its optical distorsion. - + ## Print calibration board -The first step to calibrate a camera is to create an [ArUcoBoard](../../argaze.md/#argaze.ArUcoMarkers.ArUcoBoard) like in the code below: +The first step to calibrate a camera is to create an [ArUcoBoard](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoBoard) like in the code below: ``` python from argaze.ArUcoMarkers import ArUcoMarkersDictionary, ArUcoBoard @@ -29,9 +29,9 @@ Let's print the calibration board before to go further. ## Capture board pictures -Then, the calibration process needs to make many different captures of an [ArUcoBoard](../../argaze.md/#argaze.ArUcoMarkers.ArUcoBoard) through the camera and then, pass them to an [ArUcoDetector](../../argaze.md/#argaze.ArUcoMarkers.ArUcoDetector.ArUcoDetector) instance to detect board corners and store them as calibration data into an [ArUcoOpticCalibrator](../../argaze.md/#argaze.ArUcoMarkers.ArUcoOpticCalibrator) for final calibration process. +Then, the calibration process needs to make many different captures of an [ArUcoBoard](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoBoard) through the camera and then, pass them to an [ArUcoDetector](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoDetector.ArUcoDetector) instance to detect board corners and store them as calibration data into an [ArUcoOpticCalibrator](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoOpticCalibrator) for final calibration process. - + The sample of code below illustrates how to: @@ -131,3 +131,61 @@ Below, an optic_parameters JSON file example: ] } ``` + +## Load and display optic parameters + +[ArUcoCamera.detector.optic_parameters](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoOpticCalibrator.OpticParameters) can be enabled thanks to a dedicated JSON entry. + +Here is an extract from the JSON [ArUcoCamera](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) configuration file where optic parameters are loaded and displayed: + +```json +{ + "name": "My FullHD Camera", + "size": [1920, 1080], + "aruco_detector": { + "dictionary": "DICT_APRILTAG_16h5", + "marker_size": 5, + "optic_parameters": { + "rms": 0.6688921504088245, + "dimensions": [ + 1920, + 1080 + ], + "K": [ + [ + 1135.6524381415752, + 0.0, + 956.0685325355497 + ], + [ + 0.0, + 1135.9272506869524, + 560.059099810324 + ], + [ + 0.0, + 0.0, + 1.0 + ] + ], + "D": [ + 0.01655492265003404, + 0.1985524264972037, + 0.002129965902489484, + -0.0019528582922179365, + -0.5792910353639452 + ] + } + }, + ... + "image_parameters": { + ... + "draw_optic_parameters_grid": { + "width": 192, + "height": 108, + "z": 100, + "point_size": 1, + "point_color": [0, 0, 255] + } + } +```
\ No newline at end of file diff --git a/docs/user_guide/aruco_markers_pipeline/advanced_topics/scripting.md b/docs/user_guide/aruco_markers_pipeline/advanced_topics/scripting.md new file mode 100644 index 0000000..892d6dd --- /dev/null +++ b/docs/user_guide/aruco_markers_pipeline/advanced_topics/scripting.md @@ -0,0 +1,136 @@ +Script the pipeline +=================== + +All aruco markers pipeline objects are accessible from Python script. +This could be particularly useful for realtime AR interaction applications. + +## Load ArUcoCamera configuration from dictionary + +First of all, [ArUcoCamera](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) configuration can be loaded from a python dictionary. + +```python +from argaze.ArUcoMarkers import ArUcoCamera + +# Edit a dict with ArUcoCamera configuration +configuration = { + "name": "My FullHD camera", + "size": (1920, 1080), + ... + "aruco_detector": { + ... + }, + "scenes": { + "MyScene" : { + "aruco_markers_group": { + ... + }, + "layers": { + "MyLayer": { + "aoi_scene": { + ... + } + }, + ... + } + }, + ... + } + "layers": { + "MyLayer": { + ... + }, + ... + }, + "image_parameters": { + ... + } +} + +# Load ArUcoCamera +aruco_camera = ArUcoCamera.ArUcoCamera.from_dict(configuration) + +# Do something with ArUcoCamera +... +``` + +## Access to ArUcoCamera and ArScenes attributes + +Then, once the configuration is loaded, it is possible to access to its attributes: [read ArUcoCamera code reference](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) to get a complete list of what is available. + +Thus, the [ArUcoCamera.scenes](../../../argaze.md/#argaze.ArFeatures.ArCamera) attribute allows to access each loaded aruco scene and so, access to their attributes: [read ArUcoScene code reference](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) to get a complete list of what is available. + +```python +from argaze import ArFeatures + +# Assuming the ArUcoCamera is loaded +... + +# Iterate over each ArUcoCamera scene +for name, aruco_scene in aruco_camera.scenes.items(): + ... +``` + +## Pipeline execution outputs + +[ArUcoCamera.watch](../../../argaze.md/#argaze.ArFeatures.ArCamera.watch) method returns data about pipeline execution. + +```python +# Assuming that images are available +...: + + # Watch image with ArUco camera + detection_time, projection_time, exception = aruco_camera.watch(image) + + # Do something with pipeline times + ... + + # Do something with pipeline exception + if exception: + ... +``` + +Let's understand the meaning of each returned data. + +### *detection_time* + +ArUco marker detection time in ms. + +### *projection_time* + +Scenes projection time in ms. + +### *exception* + +A [python Exception](https://docs.python.org/3/tutorial/errors.html#exceptions) object raised during pipeline execution. + +## Setup ArUcoCamera image parameters + +Specific [ArUcoCamera.image](../../../argaze.md/#argaze.ArFeatures.ArFrame.image) method parameters can be configured thanks to a python dictionary. + +```python +# Assuming ArUcoCamera is loaded +... + +# Edit a dict with ArUcoCamera image parameters +image_parameters = { + "draw_detected_markers": { + ... + }, + "draw_scenes": { + ... + }, + "draw_optic_parameters_grid": { + ... + }, + ... +} + +# Pass image parameters to ArUcoCamera +aruco_camera_image = aruco_camera.image(**image_parameters) + +# Do something with ArUcoCamera image +... +``` + +!!! note + [ArUcoCamera](../../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) inherits from [ArFrame](../../../argaze.md/#argaze.ArFeatures.ArFrame) and so, benefits from all image parameters described in [gaze analysis pipeline visualisation section](../../gaze_analysis_pipeline/visualisation.md).
\ No newline at end of file diff --git a/docs/user_guide/aruco_markers_pipeline/aoi_3d_description.md b/docs/user_guide/aruco_markers_pipeline/aoi_3d_description.md new file mode 100644 index 0000000..b02bc9e --- /dev/null +++ b/docs/user_guide/aruco_markers_pipeline/aoi_3d_description.md @@ -0,0 +1,53 @@ +Describe 3D AOI +=============== + +Now [scene pose is estimated](aruco_markers_description.md) thanks to ArUco markers description, [areas of interest (AOI)](../../argaze.md/#argaze.AreaOfInterest.AOIFeatures.AreaOfInterest) need to be described into the same 3D referential. + +In the example scene, the screen and the sheet are considered as areas of interest. + + + +All AOI need to be described from same origin than markers in a [right-handed 3D axis](https://robotacademy.net.au/lesson/right-handed-3d-coordinate-frame/) where: + +* +X is pointing to the right, +* +Y is pointing to the top, +* +Z is pointing to the backward. + +!!! warning + All AOI spatial values must be given in **centimeters**. + +### Edit OBJ file description + +OBJ file format could be exported from most 3D editors. + +``` obj +o Sheet +v 14.200000 -3.000000 28.350000 +v 35.200000 -3.000000 28.350000 +v 14.200000 -3.000000 -1.35 +v 35.200000 -3.000000 -1.35 +f 1 2 4 3 +o Screen +v 2.750000 2.900000 -0.500000 +v 49.250000 2.900000 -0.500000 +v 2.750000 29.100000 -0.500000 +v 49.250000 29.100000 -0.500000 +f 5 6 8 7 +``` + +Here are common OBJ file features needed to describe AOI: + +* Object lines (starting with *o* key) indicate AOI name. +* Vertice lines (starting with *v* key) indicate AOI vertices. +* Face (starting with *f* key) link vertices together. + +### Edit JSON file description + +JSON file format allows to describe AOI vertices. + +``` json +{ + "Sheet": [[14.2, -3, 28.35], [35.2, -3, 28.35], [14.2, -3, -1.35], [35.2, -3, -1.35]], + "Screen": [[2.75, 2.9, -0.5], [49.25, 2.9, -0.5], [2.75, 29.1, -0.5], [49.25, 29.1, -0.5]] +} +``` diff --git a/docs/user_guide/aruco_markers_pipeline/aoi_3d_frame.md b/docs/user_guide/aruco_markers_pipeline/aoi_3d_frame.md new file mode 100644 index 0000000..f1ae1f6 --- /dev/null +++ b/docs/user_guide/aruco_markers_pipeline/aoi_3d_frame.md @@ -0,0 +1,128 @@ +Define a 3D AOI as a frame +========================== + +When an 3D AOI of the scene contains others coplanar 3D AOI, like a screen with GUI elements displayed on, it is better to described them as 2D AOI inside 2D coordinates system related to the containing 3D AOI. + + + +## Add ArFrame to ArUcoScene + +The [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame) class defines a rectangular area where timestamped gaze positions are projected in and inside which they need to be analyzed. + +Here is the previous extract where "Screen" AOI is defined as a frame into [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) configuration: + +```json +{ + "name": "My FullHD camera", + "size": [1920, 1080], + ... + "scenes": { + "MyScene" : { + "aruco_markers_group": { + ... + }, + "layers": { + "MyLayer": { + "aoi_scene": { + "Sheet": [[14.2, -3, 28.35], [35.2, -3, 28.35], [14.2, -3, -1.35], [35.2, -3, -1.35]], + "Screen": [[2.75, 2.9, -0.5], [49.25, 2.9, -0.5], [2.75, 29.1, -0.5], [49.25, 29.1, -0.5]] + } + } + }, + "frames": { + "Screen": { + "size": [1920, 1080], + "layers": { + "MyLayer": { + "aoi_scene": { + "GeoSector": [[860, 160], [1380, 100], [1660, 400], [1380, 740], [1440, 960], [920, 920], [680, 800], [640, 560]], + "LeftPanel": { + "Rectangle": { + "x": 0, + "y": 0, + "width": 350, + "height": 1080 + } + }, + "CircularWidget": { + "Circle": { + "cx": 1800, + "cy": 120, + "radius": 80 + } + } + } + } + } + } + } + } + } + ... +} +``` +Now, let's understand the meaning of each JSON entry. + +### *frames* + +An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) instance can contains multiples [ArFrames](../../argaze.md/#argaze.ArFeatures.ArFrame) stored by name. + +### Screen + +The name of a 3D AOI **and** an [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame). Basically useful for visualisation purpose. + +!!! warning "AOI / Frame names policy" + + An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) layer 3D AOI is defined as an [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) frame, **provided they have the same name**. + +!!! warning "Layer name policy" + + An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) frame layer is projected into [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) layer, **provided they have the same name**. + +!!! note + + [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) frame layers are projected into their dedicated [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) layers when the JSON configuration file is loaded. + +## Pipeline execution + +### Map ArUcoCamera image into ArUcoScenes frames + +After camera image is passed to [ArUcoCamera.watch](../../argaze.md/#argaze.ArFeatures.ArCamera.watch) method, it is possible to apply a perpective transformation in order to project watched image into each [ArUcoScenes](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) [frames background](../../argaze.md/#argaze.ArFeatures.ArFrame) image. + +```python +# Assuming that Full HD (1920x1080) video stream or file is opened +... + +# Assuming that the video reading is handled in a looping code block +...: + + # Capture image from video stream of file + image = video_capture.read() + + # Detect ArUco markers, estimate scene pose then, project 3D AOI into camera frame + aruco_camera.watch(image) + + # Map watched image into ArUcoScenes frames background + aruco_camera.map() +``` + +### Analyse timestamped gaze positions into ArUcoScenes frames + +[ArUcoScenes](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) frames benefits from all the services described in [gaze analysis pipeline section](../gaze_analysis_pipeline/introduction.md). + +!!! note + + Timestamped gaze positions passed to [ArUcoCamera.look](../../argaze.md/#argaze.ArFeatures.ArFrame.look) method are projected into [ArUcoScenes](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) frames if applicable. + +### Display each ArUcoScenes frames + +All [ArUcoScenes](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) frames image can be displayed as any [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame). + +```python + ... + + # Display all ArUcoScenes frames + for frame in aruco_camera.scene_frames: + + ... frame.image() +```
\ No newline at end of file diff --git a/docs/user_guide/aruco_markers_pipeline/aoi_projection.md b/docs/user_guide/aruco_markers_pipeline/aoi_3d_projection.md index 027f805..8c7310b 100644 --- a/docs/user_guide/aruco_markers_pipeline/aoi_projection.md +++ b/docs/user_guide/aruco_markers_pipeline/aoi_3d_projection.md @@ -1,15 +1,15 @@ -Project AOI into camera frame -============================= +Project 3D AOI into camera frame +================================ -Once [ArUcoScene pose is estimated](pose_estimation.md) and [AOI are described](aoi_description.md), AOI can be projected into [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) frame. +Once [ArUcoScene pose is estimated](pose_estimation.md) and [3D AOI are described](aoi_3d_description.md), AOI can be projected into [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) frame. - + -## Add ArLayer to ArUcoScene to load AOI +## Add ArLayer to ArUcoScene to load 3D AOI -The [ArLayer](../../argaze.md/#argaze.ArFeatures.ArLayer) class allows to load areas of interest description. An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) instance can contains multiples [ArLayers](../../argaze.md/#argaze.ArFeatures.ArLayer). +The [ArLayer](../../argaze.md/#argaze.ArFeatures.ArLayer) class allows to load 3D AOI description. -Here is the previous extract where one layer is added to the [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) configuration: +Here is the previous extract where one layer is added to [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) configuration: ```json { @@ -24,9 +24,8 @@ Here is the previous extract where one layer is added to the [ArUcoScene](../../ "layers": { "MyLayer": { "aoi_scene": { - "YellowSquare": [[6.2, -7.275252, 25.246159], [31.2, -7.275252, 25.246159], [31.2, 1.275252, 1.753843], [6.2, 1.275252, 1.753843]], - "GrayRectangle": [[2.5, 2.5, -0.5], [37.5, 2.5, -0.5], [37.5, 27.5, -0.5], [2.5, 27.5, -0.5]], - "BlueTriangle": [[12.5, 7.5, -0.5], [27.5, 7.5, -0.5], [20, 22.5, -0.5]] + "Sheet": [[14.2, -3, 28.35], [35.2, -3, 28.35], [14.2, -3, -1.35], [35.2, -3, -1.35]], + "Screen": [[2.75, 2.9, -0.5], [49.25, 2.9, -0.5], [2.75, 29.1, -0.5], [49.25, 29.1, -0.5]] } } } @@ -38,17 +37,21 @@ Here is the previous extract where one layer is added to the [ArUcoScene](../../ Now, let's understand the meaning of each JSON entry. -### "MyLayer" +### *layers* -The name of the [ArLayer](../../argaze.md/#argaze.ArFeatures.ArLayer). Basically useful for visualisation purpose. +An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) instance can contains multiples [ArLayers](../../argaze.md/#argaze.ArFeatures.ArLayer) stored by name. -### AOI Scene +### MyLayer -The [AOIScene](../../argaze.md/#argaze.AreaOfInterest.AOIFeatures.AOIScene) defines a set of 3D [AreaOfInterest](../../argaze.md/#argaze.AreaOfInterest.AOIFeatures.AreaOfInterest) registered by name. +The name of an [ArLayer](../../argaze.md/#argaze.ArFeatures.ArLayer). Basically useful for visualisation purpose. -## Add ArLayer to ArUcoCamera to project AOI +### *aoi_scene* -Here is the previous extract where one layer is added to the [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) and displayed: +The set of 3D AOI into the layer as defined at [3D AOI description chapter](aoi_3d_description.md). + +## Add ArLayer to ArUcoCamera to project 3D AOI into + +Here is the previous extract where one layer is added to [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) configuration and displayed: ```json { @@ -91,21 +94,25 @@ Here is the previous extract where one layer is added to the [ArUcoCamera](../.. Now, let's understand the meaning of each JSON entry. -### "MyLayer" +### *layers* + +An [ArUcoCamera](../../argaze.md/#argaze.ArFeatures.ArFrame) instance can contains multiples [ArLayers](../../argaze.md/#argaze.ArFeatures.ArLayer) stored by name. + +### MyLayer -The name of the [ArLayer](../../argaze.md/#argaze.ArFeatures.ArLayer). Basically useful for visualisation purpose. +The name of an [ArLayer](../../argaze.md/#argaze.ArFeatures.ArLayer). Basically useful for visualisation purpose. !!! warning "Layer name policy" - An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) layer is projected into [an ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) layer, **provided they have the same name**. + An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) layer is projected into an [ ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) layer, **provided they have the same name**. !!! note [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) layers are projected into their dedicated [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) layers when calling the [ArUcoCamera.watch](../../argaze.md/#argaze.ArFeatures.ArCamera.watch) method. -## Add AOI analysis +## Add AOI analysis features to ArUcoCamera layer -When a scene layer is projected into a camera layer, it means that the 3D [ArLayer.aoi_scene](../../argaze.md/#argaze.ArFeatures.ArLayer.aoi_scene) description of the scene becomes the 2D camera's [ArLayer.aoi_scene](../../argaze.md/#argaze.ArFeatures.ArLayer.aoi_scene) description of the camera. +When a scene layer is projected into a camera layer, it means that the 3D scene's AOI are transformed into 2D camera's AOI. Therefore, it means that [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) benefits from all the services described in [AOI analysis pipeline section](../gaze_analysis_pipeline/aoi_analysis.md). @@ -156,4 +163,4 @@ Here is the previous extract where AOI matcher, AOI scan path and AOI scan path !!! warning - Adding scan path and scan path analyzers to an [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) layer doesn't make sense if the camera is moving. + Adding scan path and scan path analyzers to an [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) layer doesn't make sense as the space viewed thru camera frame doesn't necessary reflect the space the gaze is covering. diff --git a/docs/user_guide/aruco_markers_pipeline/aoi_description.md b/docs/user_guide/aruco_markers_pipeline/aoi_description.md deleted file mode 100644 index 101ec9f..0000000 --- a/docs/user_guide/aruco_markers_pipeline/aoi_description.md +++ /dev/null @@ -1,62 +0,0 @@ -Describe AOI -============ - -Once [ArUco markers are placed into a scene](aruco_markers_description.md), areas of interest need to be described into the same 3D referential. - -In the example scene, each screen is considered as an area of interest more the blue triangle area inside the top screen. - - - -All AOIs need to be described from same origin than markers in a [right-handed 3D axis](https://robotacademy.net.au/lesson/right-handed-3d-coordinate-frame/) where: - -* +X is pointing to the right, -* +Y is pointing to the top, -* +Z is pointing to the backward. - -!!! warning - All AOIs spatial values must be given in **centimeters**. - -### Edit OBJ file description - -OBJ file format could be exported from most 3D editors. - -``` obj -o YellowSquare -v 6.200003 -7.275252 25.246159 -v 31.200003 -7.275252 25.246159 -v 6.200003 1.275252 1.753843 -v 31.200003 1.275252 1.753843 -s off -f 1 2 4 3 -o GrayRectangle -v 2.500000 2.500000 -0.500000 -v 37.500000 2.500000 -0.500000 -v 2.500000 27.500000 -0.500000 -v 37.500000 27.500000 -0.500000 -s off -f 5 6 8 7 -o BlueTriangle -v 12.500002 7.500000 -0.500000 -v 27.500002 7.500000 -0.500000 -v 20.000002 22.500000 -0.500000 -s off -f 9 10 11 -``` - -Here are common OBJ file features needed to describe AOIs: - -* Object lines (starting with *o* key) indicate AOI name. -* Vertice lines (starting with *v* key) indicate AOI vertices. -* Face (starting with *f* key) link vertices together. - -### Edit JSON file description - -JSON file format allows to describe AOIs vertices. - -``` json -{ - "YellowSquare": [[6.2, -7.275252, 25.246159], [31.2, -7.275252, 25.246159], [31.2, 1.275252, 1.753843], [6.2, 1.275252, 1.753843]], - "GrayRectangle": [[2.5, 2.5, -0.5], [37.5, 2.5, -0.5], [37.5, 27.5, -0.5], [2.5, 27.5, -0.5]], - "BlueTriangle": [[12.5, 7.5, -0.5], [27.5, 7.5, -0.5], [20, 22.5, -0.5]] -} -``` diff --git a/docs/user_guide/aruco_markers_pipeline/aruco_markers_description.md b/docs/user_guide/aruco_markers_pipeline/aruco_markers_description.md index 1c13013..6380f88 100644 --- a/docs/user_guide/aruco_markers_pipeline/aruco_markers_description.md +++ b/docs/user_guide/aruco_markers_pipeline/aruco_markers_description.md @@ -3,11 +3,11 @@ Set up ArUco markers First of all, ArUco markers needs to be printed and placed into the scene. -Here is an example scene where markers are surrounding a multi-screen workspace with a triangle area inside one of them. +Here is an example scene where markers are surrounding a workspace with a screen and a sheet on the table (considering the sheet stays static for the moment).  -## Print ArUco markers from a ArUco dictionary +## Print ArUco markers from an ArUco dictionary ArUco markers always belongs to a set of markers called ArUco markers dictionary. @@ -65,24 +65,18 @@ v 0.000000 0.000000 0.000000 v 5.000000 0.000000 0.000000 v 0.000000 5.000000 0.000000 v 5.000000 5.000000 0.000000 -vn 0.0000 0.0000 1.0000 -s off f 1//1 2//1 4//1 3//1 o DICT_APRILTAG_16h5#1_Marker -v -1.767767 23.000002 3.767767 -v 1.767767 23.000002 0.232233 -v -1.767767 28.000002 3.767767 -v 1.767767 28.000002 0.232233 -vn 0.7071 0.0000 0.7071 -s off +v -0.855050 24.000002 4.349232 +v 0.855050 24.000002 -0.349231 +v -0.855050 29.000002 4.349232 +v 0.855050 29.000002 -0.349231 f 5//2 6//2 8//2 7//2 o DICT_APRILTAG_16h5#2_Marker -v 33.000000 -1.767767 4.767767 -v 38.000000 -1.767767 4.767767 -v 33.000000 1.767767 1.232233 -v 38.000000 1.767767 1.232233 -vn 0.0000 0.7071 0.7071 -s off +v 44.000000 0.000000 9.500000 +v 49.000000 0.000000 9.500000 +v 44.000000 -0.000000 4.500000 +v 49.000000 -0.000000 4.500000 f 9//3 10//3 12//3 11//3 ``` @@ -90,7 +84,6 @@ Here are common OBJ file features needed to describe ArUco markers places: * Object lines (starting with *o* key) indicate markers dictionary and id by following this format: **DICTIONARY**#**ID**\_Marker. * Vertice lines (starting with *v* key) indicate markers corners. The marker size will be automatically deducted from the geometry. -* Plane normals (starting with *vn* key) need to be exported for further pose estimation. * Face (starting with *f* key) link vertices and normals indexes together. !!! warning @@ -110,12 +103,12 @@ JSON file format allows to describe markers places using translation and euler a "rotation": [0, 0, 0] }, "1": { - "translation": [0, 25.5, 2], - "rotation": [0, 45, 0] + "translation": [0, 26.5, 2], + "rotation": [0, 70, 0] }, "2": { - "translation": [35.5, 0, 3], - "rotation": [-45, 0, 0] + "translation": [46.5, 0, 7], + "rotation": [-90, 0, 0] } } } diff --git a/docs/user_guide/aruco_markers_pipeline/configuration_and_execution.md b/docs/user_guide/aruco_markers_pipeline/configuration_and_execution.md index 81c577f..60a1115 100644 --- a/docs/user_guide/aruco_markers_pipeline/configuration_and_execution.md +++ b/docs/user_guide/aruco_markers_pipeline/configuration_and_execution.md @@ -3,7 +3,7 @@ Load and execute pipeline Once [ArUco markers are placed into a scene](aruco_markers_description.md), they can be detected thanks to [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) class. -As [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) inherits from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame), the [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) class also benefits from all the services described in [gaze analysis pipeline section](./user_guide/gaze_analysis_pipeline/introduction.md). +As [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) inherits from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame), the [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) class also benefits from all the services described in [gaze analysis pipeline section](../gaze_analysis_pipeline/introduction.md).  @@ -29,6 +29,12 @@ Here is a simple JSON [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCa }, "image_parameters": { "background_weight": 1, + "draw_detected_markers": { + "color": [0, 255, 0], + "draw_axes": { + "thickness": 3 + } + }, "draw_gaze_positions": { "color": [0, 255, 255], "size": 2 @@ -40,12 +46,6 @@ Here is a simple JSON [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCa }, "draw_saccades": { "line_color": [255, 0, 255] - }, - "draw_detected_markers": { - "color": [0, 255, 0], - "draw_axes": { - "thickness": 3 - } } } } @@ -62,15 +62,15 @@ aruco_camera = ArUcoCamera.ArUcoCamera.from_json('./configuration.json') Now, let's understand the meaning of each JSON entry. -### Name - *inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* +### *name - inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* The name of the [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) frame. Basically useful for visualisation purpose. -### Size - *inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* +### *size - inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* The size of the [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) frame in pixels. Be aware that gaze positions have to be in the same range of value to be projected in. -### ArUco Detector +### *aruco_detector* The first [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) pipeline step is to detect ArUco markers inside input image and estimate their poses. @@ -81,21 +81,21 @@ The [ArUcoDetector](../../argaze.md/#argaze.ArUcoMarkers.ArUcoDetector) is in ch !!! warning "Mandatory" JSON *aruco_detector* entry is mandatory. -### Gaze Movement Identifier - *inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* +### *gaze_movement_identifier - inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* The first [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame) pipeline step dedicated to identify fixations or saccades from consecutive timestamped gaze positions.  -### Image parameters - *inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* +### *image_parameters - inherited from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame)* -The usual [ArFrame visualisation parameters](./user_guide/gaze_analysis_pipeline/visualisation.md) plus one additional *draw_detected_markers* field. +The usual [ArFrame visualisation parameters](../gaze_analysis_pipeline/visualisation.md) plus one additional *draw_detected_markers* field. ## Pipeline execution -### Detect ArUco markers, estimate scene pose and project AOI +### Detect ArUco markers, estimate scene pose and project 3D AOI -Pass each camera image to [ArUcoCamera.watch](../../argaze.md/#argaze.ArFeatures.ArCamera.watch) method to execute the whole pipeline dedicated to ArUco markers detection, scene pose estimation and AOI projection. +Pass each camera image to [ArUcoCamera.watch](../../argaze.md/#argaze.ArFeatures.ArCamera.watch) method to execute the whole pipeline dedicated to ArUco markers detection, scene pose estimation and 3D AOI projection. ```python # Assuming that Full HD (1920x1080) video stream or file is opened @@ -107,19 +107,16 @@ Pass each camera image to [ArUcoCamera.watch](../../argaze.md/#argaze.ArFeatures # Capture image from video stream of file image = video_capture.read() - # Detect ArUco markers, estimate scene pose then, project AOI into camera frame + # Detect ArUco markers, estimate scene pose then, project 3D AOI into camera frame aruco_camera.watch(image) - # Display ArUcoCamera frame image to display detected ArUco markers, scene pose, AOI projection and ArFrame visualisation. + # Display ArUcoCamera frame image to display detected ArUco markers, scene pose, 2D AOI projection and ArFrame visualisation. ... aruco_camera.image() ``` -!!! warning "Pose estimation error" - ArUco markers pose estimation algorithm can lead to errors due to geometric ambiguities as explain in [this article](https://ieeexplore.ieee.org/document/1717461). To discard such ambiguous cases, markers should **as less as possible be parallel to camera plan**. - ### Analyse timestamped gaze positions into camera frame -As mentioned above, [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) inherits from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame) and so, benefits from all the services described in [gaze analysis pipeline section](./user_guide/gaze_analysis_pipeline/introduction.md). +As mentioned above, [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) inherits from [ArFrame](../../argaze.md/#argaze.ArFeatures.ArFrame) and so, benefits from all the services described in [gaze analysis pipeline section](../gaze_analysis_pipeline/introduction.md). Particularly, timestamped gaze positions can be passed one by one to [ArUcoCamera.look](../../argaze.md/#argaze.ArFeatures.ArFrame.look) method to execute the whole pipeline dedicated to gaze analysis. @@ -135,4 +132,4 @@ Particularly, timestamped gaze positions can be passed one by one to [ArUcoCamer At this point, the [ArUcoCamera.watch](../../argaze.md/#argaze.ArFeatures.ArCamera.watch) method only detects ArUco markers and the [ArUcoCamera.look](../../argaze.md/#argaze.ArFeatures.ArCamera.look) method only process gaze movement identification without any AOI support as no scene description is provided into the JSON configuration file. - Read the next chapters to learn [how to estimate scene pose](pose_estimation.md) and [how to project AOI](aoi_projection.md).
\ No newline at end of file + Read the next chapters to learn [how to estimate scene pose](pose_estimation.md), [how to describe 3D scene's AOI](aoi_3d_description.md) and [how to project them into camera frame](aoi_3d_projection.md).
\ No newline at end of file diff --git a/docs/user_guide/aruco_markers_pipeline/introduction.md b/docs/user_guide/aruco_markers_pipeline/introduction.md index 836569a..37ab055 100644 --- a/docs/user_guide/aruco_markers_pipeline/introduction.md +++ b/docs/user_guide/aruco_markers_pipeline/introduction.md @@ -1,29 +1,29 @@ Overview ======== -This section explains how to build augmented reality pipelines based on ArUco Markers technology for various use cases. +This section explains how to build augmented reality pipelines based on [ArUco Markers technology](https://www.sciencedirect.com/science/article/abs/pii/S0031320314000235) for various use cases. -The OpenCV library provides a module to detect fiducial markers into a picture and estimate their poses (cf [OpenCV ArUco tutorial page](https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html)). +The OpenCV library provides a module to detect fiducial markers into a picture and estimate their poses. -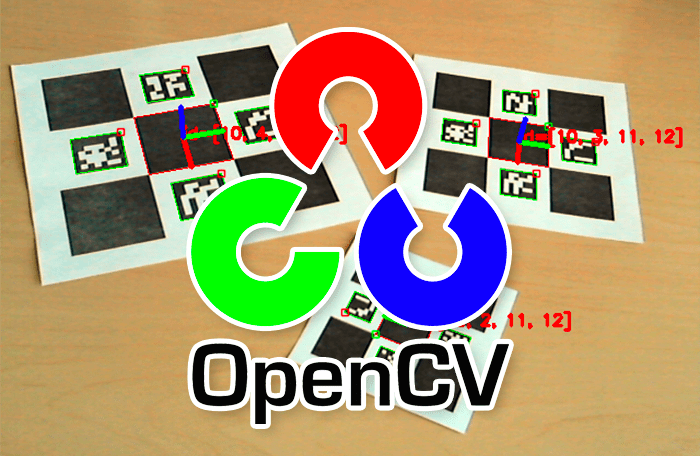 + -The ArGaze [ArUcoMarkers submodule](../../argaze.md/#argaze.ArUcoMarkers) eases markers creation, optic calibration, markers detection and 3D scene pose estimation through a set of high level classes. +The ArGaze [ArUcoMarkers submodule](../../argaze.md/#argaze.ArUcoMarkers) eases markers creation, markers detection and 3D scene pose estimation through a set of high level classes. -First, let's look at the schema below: it gives an overview of the main notions involved in the following chapters. +<!-- First, let's look at the schema below: it gives an overview of the main notions involved in the following chapters. --> - +<!--  --> To build your own ArUco markers pipeline, you need to know: * [How to setup ArUco markers into a scene](aruco_markers_description.md), -* [How to describe scene's AOI](aoi_description.md), * [How to load and execute ArUco markers pipeline](configuration_and_execution.md), * [How to estimate scene pose](pose_estimation.md), -* [How to project AOI into camera frame](aoi_projection.md), -* [How to visualize ArUcoCamera and ArUcoScenes](visualisation.md) +* [How to describe scene's AOI](aoi_3d_description.md), +* [How to project 3D AOI into camera frame](aoi_3d_projection.md), +* [How to define a 3D AOI as a frame](aoi_3d_frame.md). More advanced features are also explained like: -* [How to script ArUco markers pipeline](advanced_topics/scripting.md) -* [How to calibrate optic parameters](optic_parameters_calibration.md) -* [How to improve ArUco markers detection](advanced_topics/aruco_detector_configuration.md) +* [How to script ArUco markers pipeline](advanced_topics/scripting.md), +* [How to calibrate optic parameters](advanced_topics/optic_parameters_calibration.md), +* [How to improve ArUco markers detection](advanced_topics/aruco_detector_configuration.md). diff --git a/docs/user_guide/aruco_markers_pipeline/pose_estimation.md b/docs/user_guide/aruco_markers_pipeline/pose_estimation.md index 6acafee..6b58b24 100644 --- a/docs/user_guide/aruco_markers_pipeline/pose_estimation.md +++ b/docs/user_guide/aruco_markers_pipeline/pose_estimation.md @@ -1,13 +1,13 @@ Estimate scene pose =================== -An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) class defines a space with [ArUco markers inside](aruco_markers_description.md) helping to estimate scene pose when they are watched by [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera). +Once [ArUco markers are placed into a scene](aruco_markers_description.md) and [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) is [configured](configuration_and_execution.md), scene pose can be estimated.  ## Add ArUcoScene to ArUcoCamera JSON configuration file -An [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) instance can contains multiples [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene). +An [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) class defines a space with [ArUco markers inside](aruco_markers_description.md) helping to estimate scene pose when they are watched by [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera). Here is an extract from the JSON [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) configuration file with a sample where one scene is added and displayed: @@ -27,17 +27,17 @@ Here is an extract from the JSON [ArUcoCamera](../../argaze.md/#argaze.ArUcoMark "rotation": [0, 0, 0] }, "1": { - "translation": [0, 25.5, 2], - "rotation": [0, 45, 0] + "translation": [0, 26.5, 2], + "rotation": [0, 70, 0] }, "2": { - "translation": [35.5, 0, 3], - "rotation": [-45, 0, 0] + "translation": [46.5, 0, 7], + "rotation": [-90, 0, 0] } } } } - } + }, ... "image_parameters": { ... @@ -51,10 +51,6 @@ Here is an extract from the JSON [ArUcoCamera](../../argaze.md/#argaze.ArUcoMark "draw_places": { "color": [0, 0, 0], "border_size": 1 - }, - "draw_places_axes": { - "thickness": 1, - "length": 2.5 } } } @@ -65,11 +61,15 @@ Here is an extract from the JSON [ArUcoCamera](../../argaze.md/#argaze.ArUcoMark Now, let's understand the meaning of each JSON entry. -### "MyScene" +### *scenes* + +An [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) instance can contains multiples [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) stored by name. + +### MyScene -The name of the [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene). Basically useful for visualisation purpose. +The name of an [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene). Basically useful for visualisation purpose. -### ArUco markers group +### *aruco_markers_group* The 3D places of ArUco markers into the scene as defined at [ArUco markers description chapter](aruco_markers_description.md). Thanks to this description, it is possible to estimate the pose of [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) in [ArUcoCamera](../../argaze.md/#argaze.ArUcoMarkers.ArUcoCamera) frame. @@ -77,6 +77,6 @@ The 3D places of ArUco markers into the scene as defined at [ArUco markers descr [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) pose estimation is done when calling the [ArUcoCamera.watch](../../argaze.md/#argaze.ArFeatures.ArCamera.watch) method. -### Draw scenes +### *draw_scenes* The drawing parameters of each loaded [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene) in [ArUcoCamera.image](../../argaze.md/#argaze.ArFeatures.ArFrame.image). |