blob: dc8d4cb811512d6d20dcfa9e22d9facf743fd663 (
plain)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
About ArUco markers
===================
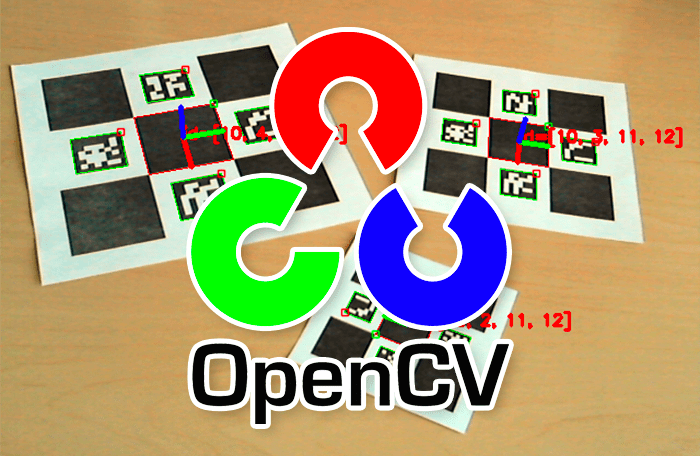
The OpenCV library provides a module to detect fiducial markers into a picture and estimate its pose (cf [OpenCV ArUco tutorial page](https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html)).
The ArGaze [ArUcoMarkers submodule](../../argaze.md/#argaze.ArUcoMarkers) eases markers creation, camera calibration, markers detection and 3D scene pose estimation through a set of high level classes:
* [ArUcoMarkersDictionary](../../argaze.md/#argaze.ArUcoMarkers.ArUcoMarkersDictionary)
* [ArUcoMarkers](../../argaze.md/#argaze.ArUcoMarkers.ArUcoMarker)
* [ArUcoBoard](../../argaze.md/#argaze.ArUcoMarkers.ArUcoBoard)
* [ArUcoOpticCalibrator](../../argaze.md/#argaze.ArUcoMarkers.ArUcoOpticCalibrator)
* [ArUcoDetector](../../argaze.md/#argaze.ArUcoMarkers.ArUcoDetector)
* [ArUcoScene](../../argaze.md/#argaze.ArUcoMarkers.ArUcoScene)
|